Let’s properly discuss classical trigonometry. For a novel approach using rational trigonometry, see this post. Assume that the notion of an angle is well-defined.
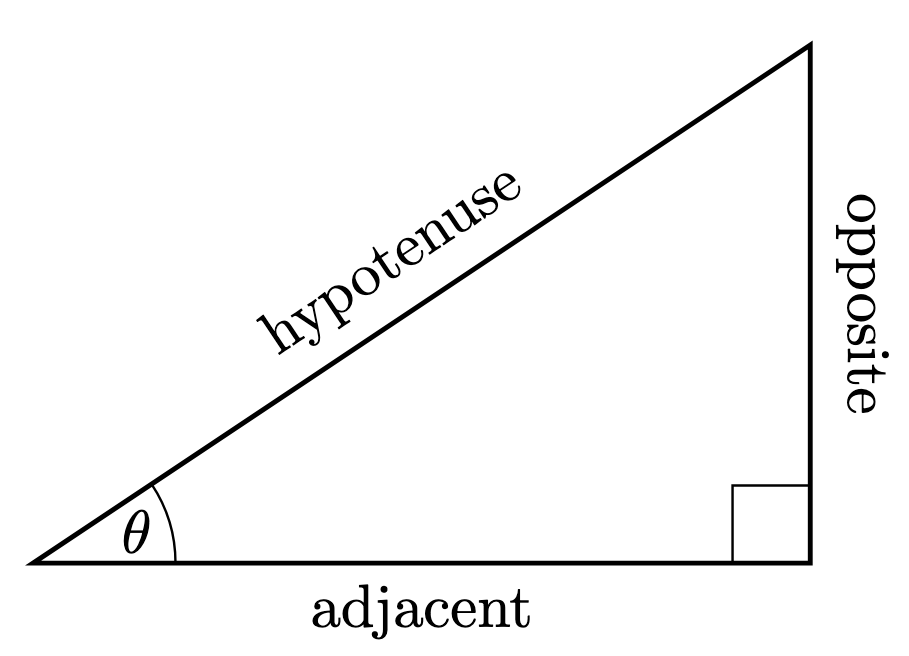
Definition 1. Consider the following right-angled triangle with acute angle . Here and subsequently, we adopt the radian notation for angles that stipulates .
We abbreviate the words opposite, adjacent, and hypotenuse. We define the sine, cosine, and tangent of as follows:
Example 1. By considering the –– and –– right triangles, we have the following trigonometric ratios for special angles:
The case will play a crucial role for us later. Denote for brevity. We will not care too much about the tangent function, since it is connected to sine and cosine in the following way:
Theorem 1. Let . Then
Proof. For the first identity, use Pythagoras’ theorem to obtain
For the second identity, we observe that
For the last identity, since the complementary angle is ,
Strictly speaking, the cosine function is effectively a mutation of the sine function, and so we could technically do all of trigonometry in terms of sine. However, cosine does have its uses and will play a crucial role in our discussions moving forward.
There are many trigonometric identities built off the first two identities, and we will leave them as exercises in algebraic manipulation. For a serious study of trigonometry, we have to ask the all-important question: what is if is not acute? In particular, what is a sensible definition for ? The answer to the latter question turns out to answer the former question.
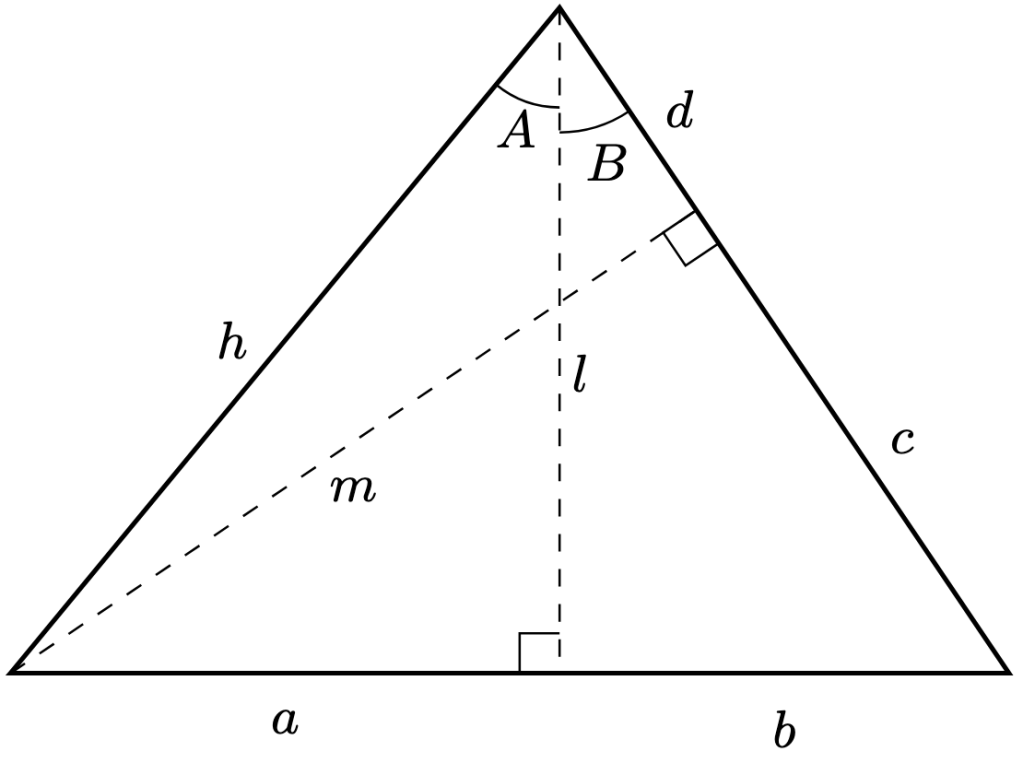
Theorem 2. Let be acute angles. If is acute, then
Proof. Consider the following diagram for the proof of both identities.
The first identity corresponds to finding an alternate expression for , and the second identity corresponds to finding an alternate expression for . The ratios of interest are
By considering the area of the whole triangle using the bases and respectively,
The key insight is the following: as long as the right-hand side is well-defined, so is the left-hand side. This is our strategy to define and on all of . Let’s systematise our plan.
Definition 1. For any subset , let be the proposition that for any , and are well-defined, and
Write to abbreviate the proposition “ is true”. Our overarching goal is to provide sensible definitions for and such that . By Theorem 1, we have established and Corollary 1 will help us “double” our results to achieve the massive sub-goal of .
Theorem 3. For any , suppose and are well-defined on . For any , denote and define
If , then .
Proof. Fix . Then . Observe that
so that and
Since , expanding the right-hand side yields
On the other hand,
With careful algebraic expansion, we will obtain
Similarly, we will obtain
Corollary 2.. In particular, we have the following special angles:
Proof. Fix . Then there exists such that . Using induction, we can prove that . Therefore, are well-defined on and the identities
hold for any . Hence, , as required.
Corollary 3. For any ,
Furthermore, for any positive integer ,
We have done a remarkable task: defining on and proving that they satisfy the desired addition formulae. But we haven’t proven this case for all of , since . Surprisingly, though, Corollary 3 gives us a unique insight. Observe that for , and are well-defined expressions. This means we can do a “reverse” definition for non-positive .
Theorem 4. For any , let denote any integer such that . The notions
are well-defined by Corollary 3. Then . In particular,
Proof. Fix . Find such that and . Then so that allows
A similar calculation yields
Thus, we have properly defined and on all of , and even proved that the identities
are well-defined and hold for any . From these two key identities, we obtain all other trigonometric identities commonly obtained in tables of mathematical formulas.
Problem 1. Let be a non-negative function satisfying the following conditions:
is continuous on ,
is differentiable on ,
is strictly increasing on ,
is strictly decreasing on , and
as .
Let denote the rectangle under the curve whose base that intersects the positive -axis has length . If has a minimum prove that is minimised when
where .
(Click for Solution)
Solution. Fix . If , then being strictly decreasing implies , a contradiction. Therefore, . Since as , there exists such that . Use the intermediate value theorem to obtain such that . It is not hard to verify that for . Therefore, the rectangle has an area of .
In fact, more is true. Since is differentiable and strictly decreasing,
Hence, . Differentiating,
Setting yields the desired result.
Problem 2. Suppose further in Problem 1 that is even. Prove that the -value that maximises satisfies the equation
Problem 1. Given functions , define and . Prove that and .
(Click for Solution)
Solution. By definition,
and
Definition 2. A function is odd (resp. even) if there exists an odd (resp. even) integer such that .
Example 1. For any integer , the function defined by is an odd (resp. even) function if and only if is an odd (resp. even) number. Furthermore, is an odd function while is an even function.
Problem 2. For any function and real number , define the function by . In particular, . Prove that is odd (resp. even) if is odd (resp. even).
(Click for Solution)
Solution. We observe that if is odd or even, then , so that
hence .
Problem 3. Prove the following properties:
if are odd, then is odd and is even,
if are even, then is even and is even,
if is odd and is odd (resp. even), then is odd (resp. even) whenever it exists.
if is even, then is even.
(Click for Solution)
Solution. Suppose and , and assume for simplicity. Denote and as per Problem 1. Then
If and are both odd or both even, then is even, so that
Hence, is odd (resp. even) if and only if is odd (resp. even). Similarly,
If and are both odd or both even, then is always even, so that unconditionally, i.e. is even. For the composite function, define . Then
Applying the odd or even condition on ,
If is odd, then is even, so that
Thus, is odd (resp. even) if and only if is odd (resp. even). If is even, then
so that is even.
Problem 4. For any function , prove that there exist a unique odd function and a unique even function such that .
(Click for Solution)
Solution. For existence, define the functions by
It is obvious that . Since ,
so that is odd and is even. For uniqueness, suppose , where is odd and is even. Then , so that is both odd and even. Hence,
Problem 5. Fix , any odd continuous function , and any even continuous function . Prove that
Solution. We observe that . Since as , by the squeeze theorem, as , as required.
Problem 2. For any function that is continuous at , prove that if , then there exists such that for , .
(Click for Solution)
Solution. Suppose . Fix that will be chosen later. Since is continuous at , for any , there exists such that
Expanding the right-hand side, . Setting and ,
Problem 3. Let be continuous. Suppose that for any , . Prove that there exists such that either or . In particular, .
(Click for Solution)
Solution. The function is a composition of continuous functions and thus continuous. By the extreme value theorem, there exists such that for any ,
Since , , so that defining yields
Now suppose without loss of generality. In the case , apply the first case to the continuous map . We claim that .
Suppose, for a contradiction, there exists such that . Assume without loss of generality. By the intermediate value theorem, there exists such that , a contradiction. Therefore, . For any , , yielding , as required.
Problem 4. Let and suppose that for any ,
Prove that if is continuous at some , then is continuous on .
(Click for Solution)
Fix . Since is continuous at ,
so that . Therefore,
Problem 5. Let be continuous and . Prove that for any , there exists such that .
(Click for Solution)
Solution. For each , define the function . We aim to show that has at least one root. We claim that there exists such that . Otherwise, . In particular,
a contradiction. Therefore, there exists such that . A similar argument shows that there exists such that .
If at least one equality holds, then set or . Otherwise, and . Use the intermediate value theorem to find between and such that , as required.
A modern myth is that calculus began after an apple struck Sir Isaac Newton in the head. Whether this story is valid or not, one thing is certain—Newton’s curiosity into gravity and motion did in fact lead him to formulate what we now know as calculus.
Newton formulated three famous laws of motion, that applied to gravitational motion on earth. While exploring that area of study launches us into Newtonian mechanics, one thing we will mention is Newton’s insight into gravitational acceleration. At least on earth, and at least for sufficiently low heights, the gravitational acceleration is constant.
Let denote the acceleration of an object in linear motion at time . Newton contemplated that the velocity of the object can be obtained by summing up approximate accelerations in small units of time:
Allowing the time intervals to approach , we obtain
But velocity in turn can be conceptualised as small packets of changes in displacements (i.e. distances with direction), so that the displacement can be defined by
From these ideas we obtain the usual equivalent definitions of velocity and acceleration:
Theorem 1. Define as per the discussions above. Suppose and . Suppose is constant. Then the following laws of kinematics hold:
It turns out that these laws of kinematics can be used to start wars, applied in the context of projectile motion. The question is simple: If we fired a cannonball with initial position , initial velocity , and initial angle to the horizontal ground, what will the cannon’s path look like?
Corollary 1. Assuming no air resistance, the horizontal displacement and vertical displacement are given by
where denotes gravitational acceleration on earth. Furthermore, the path of the cannonball follows the shape of a parabola (i.e. the graph of a quadratic function).
Proof. The initial horizontal velocity is and the horizontal acceleration is , so that by Theorem 1,
Similarly, the initial vertical velocity is and the vertical acceleration is , so that by Theorem 1,
By algebraic manipulation,
is the graph of a quadratic equation.
Now, what about if air resistance is involved? Then we need to solve differential equations. Furthermore, since we need to account for both – and -directions, we’ll need a tinge of vector calculus to properly answer this question. However, for simplicity, let’s solve answer the question for vertical motion and assume .
Theorem 2. Let denote the velocity of an object with mass dropped from rest after time (so that ). Let be a constant that quantifies the air resistance that opposes the object’s motion. Newton’s second law yields the equation
Then as . This is known as the terminal velocity of the object.





















![\displaystyle \lim_{x \to \infty} \frac{\sqrt{4x^2 + 5}}{\sqrt[3]{x^3 - 1}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Clim_%7Bx+%5Cto+%5Cinfty%7D+%5Cfrac%7B%5Csqrt%7B4x%5E2+%2B+5%7D%7D%7B%5Csqrt%5B3%5D%7Bx%5E3+-+1%7D%7D&bg=ffffff&fg=000&s=0&c=20201002)
![x = \sqrt{x^2} = \sqrt[3]{x^3}](https://s0.wp.com/latex.php?latex=x+%3D+%5Csqrt%7Bx%5E2%7D+%3D+%5Csqrt%5B3%5D%7Bx%5E3%7D&bg=ffffff&fg=000&s=0&c=20201002)
![\begin{aligned} \lim_{x \to \infty} \frac{\sqrt{4x^2 + 5}}{\sqrt[3]{x^3 - 1}} &= \lim_{x \to \infty} \frac{\sqrt{x^2 \cdot (4 + 5 / x^2)}}{\sqrt[3]{x^3 \cdot (1 - 1/ x^3)}} \\ &= \lim_{x \to \infty} \frac{\sqrt{x^2} \cdot \sqrt{ 4 + 5 / x^2 }}{\sqrt[3]{x^3} \cdot \sqrt[3]{ 1 - 1/x^3 } } \\ &= \lim_{x \to \infty} \frac{x \cdot \sqrt{ 4 + 5/ x^{2} }}{x \cdot \sqrt[3]{ 1 - 1/x^{3} } } \\&= \lim_{x \to \infty} \frac{\sqrt{ 4 + 5 /x^{2} }}{\sqrt[3]{ 1 - 1/x^{3} } } = \frac{\sqrt{ 4 + 0 }}{\sqrt[3]{ 1 - 0 } } = 2. \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D+%5Clim_%7Bx+%5Cto+%5Cinfty%7D+%5Cfrac%7B%5Csqrt%7B4x%5E2+%2B+5%7D%7D%7B%5Csqrt%5B3%5D%7Bx%5E3+-+1%7D%7D+%26%3D+%5Clim_%7Bx+%5Cto+%5Cinfty%7D+%5Cfrac%7B%5Csqrt%7Bx%5E2+%5Ccdot+%284+%2B+5+%2F+x%5E2%29%7D%7D%7B%5Csqrt%5B3%5D%7Bx%5E3+%5Ccdot+%281+-+1%2F+x%5E3%29%7D%7D+%5C%5C+%26%3D+%5Clim_%7Bx+%5Cto+%5Cinfty%7D+%5Cfrac%7B%5Csqrt%7Bx%5E2%7D+%5Ccdot+%5Csqrt%7B+4+%2B+5+%2F+x%5E2+%7D%7D%7B%5Csqrt%5B3%5D%7Bx%5E3%7D+%5Ccdot+%5Csqrt%5B3%5D%7B+1+-+1%2Fx%5E3+%7D+%7D+%5C%5C+%26%3D+%5Clim_%7Bx+%5Cto+%5Cinfty%7D+%5Cfrac%7Bx+%5Ccdot+%5Csqrt%7B+4+%2B+5%2F+x%5E%7B2%7D+%7D%7D%7Bx+%5Ccdot+%5Csqrt%5B3%5D%7B+1+-+1%2Fx%5E%7B3%7D+%7D+%7D+%5C%5C%26%3D+%5Clim_%7Bx+%5Cto+%5Cinfty%7D+%5Cfrac%7B%5Csqrt%7B+4+%2B+5+%2Fx%5E%7B2%7D+%7D%7D%7B%5Csqrt%5B3%5D%7B+1+-+1%2Fx%5E%7B3%7D+%7D+%7D+%3D+%5Cfrac%7B%5Csqrt%7B+4+%2B+0+%7D%7D%7B%5Csqrt%5B3%5D%7B+1+-+0+%7D+%7D+%3D+2.+%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)
 be a continuously differentiable function. Evaluate
be a continuously differentiable function. Evaluate  . Hence, evaluate
. Hence, evaluate
 so that
so that
 and
and  to obtain
to obtain

 for
for  .
. , we use the given identity
, we use the given identity![\begin{aligned} \left( \int_{-\infty}^{\infty} e^{-x^2}\, \mathrm dx \right)^2 &= \int_0^{\infty} 2 \pi x e^{-x^2}\, \mathrm dx \\ &= 2\pi \int_0^{\infty} xe^{-x^2}\, \mathrm dx \\ &= 2\pi \left[-\frac 12 e^{-x^2}\right]_0^\infty \\ &= 2\pi \left(-\frac 12 \cdot 0 + \frac 12 \cdot 1\right) = \pi. \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D+%5Cleft%28+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+e%5E%7B-x%5E2%7D%5C%2C+%5Cmathrm+dx+%5Cright%29%5E2+%26%3D+%5Cint_0%5E%7B%5Cinfty%7D+2+%5Cpi+x+e%5E%7B-x%5E2%7D%5C%2C+%5Cmathrm+dx+%5C%5C+%26%3D+2%5Cpi+%5Cint_0%5E%7B%5Cinfty%7D+xe%5E%7B-x%5E2%7D%5C%2C+%5Cmathrm+dx+%5C%5C+%26%3D+2%5Cpi+%5Cleft%5B-%5Cfrac+12+e%5E%7B-x%5E2%7D%5Cright%5D_0%5E%5Cinfty+%5C%5C+%26%3D+2%5Cpi+%5Cleft%28-%5Cfrac+12+%5Ccdot+0+%2B+%5Cfrac+12+%5Ccdot+1%5Cright%29+%3D+%5Cpi.+%5Cend%7Baligned%7D+&bg=ffffff&fg=000&s=0&c=20201002)
 . For
. For  ,
, ![\begin{aligned}\int_0^{\infty} x e^{-x^2}\, \mathrm dx &= \left[-\frac 12 e^{-x^2}\right]_{-\infty}^\infty = -\frac 12 \cdot 0 + \frac 12 \cdot 0 = 0. \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D%5Cint_0%5E%7B%5Cinfty%7D+x+e%5E%7B-x%5E2%7D%5C%2C+%5Cmathrm+dx+%26%3D+%5Cleft%5B-%5Cfrac+12+e%5E%7B-x%5E2%7D%5Cright%5D_%7B-%5Cinfty%7D%5E%5Cinfty+%3D+-%5Cfrac+12+%5Ccdot+0+%2B+%5Cfrac+12+%5Ccdot+0+%3D+0.+%5Cend%7Baligned%7D+&bg=ffffff&fg=000&s=0&c=20201002)
 , we first
, we first 
![\displaystyle \begin{aligned} \int_{-\infty}^{\infty} x^2 e^{-x^2}\, \mathrm dx &= \left[ -\frac 12 xe^{-x^2} \right]_{-\infty}^{\infty} + \frac 12 \int_{-\infty}^{\infty} e^{-x^2}\, \mathrm dx \\ &= (0 - 0) + \frac 12 \sqrt{\pi} = \frac 12 \sqrt{\pi}.\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+x%5E2+e%5E%7B-x%5E2%7D%5C%2C+%5Cmathrm+dx+%26%3D+%5Cleft%5B+-%5Cfrac+12+xe%5E%7B-x%5E2%7D+%5Cright%5D_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+%2B+%5Cfrac+12+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+e%5E%7B-x%5E2%7D%5C%2C+%5Cmathrm+dx+%5C%5C+%26%3D+%280+-+0%29+%2B+%5Cfrac+12+%5Csqrt%7B%5Cpi%7D+%3D+%5Cfrac+12+%5Csqrt%7B%5Cpi%7D.%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)
 and
and  ,
, 
 so that
so that
 so that
so that

 . Furthermore,
. Furthermore,
 .
. , where
, where  are determined from Problem 3. It is obvious that
are determined from Problem 3. It is obvious that  for any
for any  . Define
. Define
 are the probability density function and cumulative distribution function respectively of the standard normal distribution, commonly denoted
are the probability density function and cumulative distribution function respectively of the standard normal distribution, commonly denoted  .
. ,
,  .
. .
. ,
,  .
. .
.
 ,
,  yields
yields 
 is immediate since
is immediate since

 with
with  , define
, define  by
by
 is a normalising constant i.e.
is a normalising constant i.e.  .
. . Furthermore, evaluate
. Furthermore, evaluate
 so that
so that  , and
, and
 . Similarly,
. Similarly,

 .
.
 with mean
with mean  and variance
and variance  :
:
 . Here and subsequently, we adopt the radian notation for angles that stipulates
. Here and subsequently, we adopt the radian notation for angles that stipulates  .
.
 as follows:
as follows:
 –
– –
– right triangles, we have the following trigonometric ratios for special angles:
right triangles, we have the following trigonometric ratios for special angles:
 will play a crucial role for us later. Denote
will play a crucial role for us later. Denote  for brevity. We will not care too much about the tangent function, since it is connected to sine and cosine in the following way:
for brevity. We will not care too much about the tangent function, since it is connected to sine and cosine in the following way:


 ,
,
 if
if  ? The answer to the latter question turns out to answer the former question.
? The answer to the latter question turns out to answer the former question. be acute angles. If
be acute angles. If  is acute, then
is acute, then
 , and the second identity corresponds to finding an alternate expression for
, and the second identity corresponds to finding an alternate expression for  . The ratios of interest are
. The ratios of interest are
 and
and  respectively,
respectively,
 on both sides,
on both sides,





 , so that
, so that
 on both sides,
on both sides,

 is acute, then
is acute, then
 in Theorem 2.
in Theorem 2. and
and  on all of
on all of  . Let’s systematise our plan.
. Let’s systematise our plan. , let
, let  be the proposition that for any
be the proposition that for any  ,
,  and
and  are well-defined, and
are well-defined, and  . By Theorem 1, we have established
. By Theorem 1, we have established ![\phi((0, \pi/8])](https://s0.wp.com/latex.php?latex=%5Cphi%28%280%2C+%5Cpi%2F8%5D%29&bg=ffffff&fg=000&s=0&c=20201002) and Corollary 1 will help us “double” our results to achieve the massive sub-goal of
and Corollary 1 will help us “double” our results to achieve the massive sub-goal of  .
. , suppose
, suppose ![(0, 2a]](https://s0.wp.com/latex.php?latex=%280%2C+2a%5D&bg=ffffff&fg=000&s=0&c=20201002) . For any
. For any ![\theta \in (0, 4a]](https://s0.wp.com/latex.php?latex=%5Ctheta+%5Cin+%280%2C+4a%5D&bg=ffffff&fg=000&s=0&c=20201002) , denote
, denote ![\theta_2 := \theta/2 \in (0, 2a]](https://s0.wp.com/latex.php?latex=%5Ctheta_2+%3A%3D+%5Ctheta%2F2+%5Cin+%280%2C+2a%5D&bg=ffffff&fg=000&s=0&c=20201002) and define
and define
![\phi((0, a])](https://s0.wp.com/latex.php?latex=%5Cphi%28%280%2C+a%5D%29&bg=ffffff&fg=000&s=0&c=20201002) , then
, then ![\phi((0, 2a])](https://s0.wp.com/latex.php?latex=%5Cphi%28%280%2C+2a%5D%29&bg=ffffff&fg=000&s=0&c=20201002) .
.![A,B \in (0, 2a]](https://s0.wp.com/latex.php?latex=A%2CB+%5Cin+%280%2C+2a%5D&bg=ffffff&fg=000&s=0&c=20201002) . Then
. Then ![A+B \in (0, 4a]](https://s0.wp.com/latex.php?latex=A%2BB+%5Cin+%280%2C+4a%5D&bg=ffffff&fg=000&s=0&c=20201002) . Observe that
. Observe that ![(A+B)_2 = A_2 + B_2 \in (0, 2a],](https://s0.wp.com/latex.php?latex=%28A%2BB%29_2+%3D+A_2+%2B+B_2+%5Cin+%280%2C+2a%5D%2C&bg=ffffff&fg=000&s=0&c=20201002)
![A_2,B_2 \in (0, a]](https://s0.wp.com/latex.php?latex=A_2%2CB_2+%5Cin+%280%2C+a%5D&bg=ffffff&fg=000&s=0&c=20201002) and
and





 . Then there exists
. Then there exists  such that
such that ![A+B \in (0, 2^N \cdot \pi/8]](https://s0.wp.com/latex.php?latex=A%2BB+%5Cin+%280%2C+2%5EN+%5Ccdot+%5Cpi%2F8%5D&bg=ffffff&fg=000&s=0&c=20201002) . Using induction, we can prove that
. Using induction, we can prove that ![\phi((0, 2^N \cdot \pi/8])](https://s0.wp.com/latex.php?latex=%5Cphi%28%280%2C+2%5EN+%5Ccdot+%5Cpi%2F8%5D%29&bg=ffffff&fg=000&s=0&c=20201002) . Therefore,
. Therefore,  are well-defined on
are well-defined on  and the identities
and the identities
 . Hence,
. Hence,  ,
,
 ,
,
 . Surprisingly, though, Corollary 3 gives us a unique insight. Observe that for
. Surprisingly, though, Corollary 3 gives us a unique insight. Observe that for ![\theta \in (-2\pi, 0]](https://s0.wp.com/latex.php?latex=%5Ctheta+%5Cin+%28-2%5Cpi%2C+0%5D&bg=ffffff&fg=000&s=0&c=20201002) ,
,  and
and  are well-defined expressions. This means we can do a “reverse” definition for non-positive
are well-defined expressions. This means we can do a “reverse” definition for non-positive  , let
, let  denote any integer such that
denote any integer such that  . The notions
. The notions

 . Find
. Find  such that
such that  and
and  . Then
. Then  so that
so that 
 satisfies the inequality
satisfies the inequality
 . Given
. Given  , evaluate
, evaluate  .
. . For any
. For any  ,
,
 on both sides,
on both sides,
 , by the
, by the 
 . Thus,
. Thus,  between
between  and
and  such that
such that
 ,
, ,
, , and
, and as
as  .
.  denote the rectangle under the curve
denote the rectangle under the curve  whose base that intersects the positive
whose base that intersects the positive  has a minimum prove that
has a minimum prove that 
 .
. . If
. If  , then
, then  , a
, a  . Since
. Since  as
as  such that
such that  . Use the
. Use the  such that
such that  . It is not hard to verify that
. It is not hard to verify that  for
for ![x \in [a, c]](https://s0.wp.com/latex.php?latex=x+%5Cin+%5Ba%2C+c%5D&bg=ffffff&fg=000&s=0&c=20201002) . Therefore, the rectangle has an area
. Therefore, the rectangle has an area  of
of  .
. is differentiable and strictly decreasing,
is differentiable and strictly decreasing,
 . Differentiating,
. Differentiating,
 yields the desired result.
yields the desired result. that maximises
that maximises 

 .
. ,
,
 is odd:
is odd:
 . Therefore, for any
. Therefore, for any  ,
,  and
and


 . For the inequality, apply the
. For the inequality, apply the  .
.

 . To verify that this value gives the maximum, we evaluate the second derivative:
. To verify that this value gives the maximum, we evaluate the second derivative:
 and
and  , so that
, so that
 and the maximum area is given by
and the maximum area is given by
 and
and  for any
for any  by
by  .
. , define
, define  and
and  . Prove that
. Prove that  and
and  .
.

 .
. defined by
defined by  is an odd (resp. even) function if and only if
is an odd (resp. even) function if and only if  and real number
and real number  , define the function
, define the function  by
by  . In particular,
. In particular,  . Prove that
. Prove that  , so that
, so that
 .
. are odd, then
are odd, then  is odd and
is odd and  is even,
is even, is odd (resp. even) whenever it exists.
is odd (resp. even) whenever it exists. and
and  , and assume
, and assume  for simplicity. Denote
for simplicity. Denote  and
and  as per Problem 1. Then
as per Problem 1. Then
 and
and  is even, so that
is even, so that
 is odd (resp. even) if and only if
is odd (resp. even) if and only if 
 is always even, so that
is always even, so that  unconditionally, i.e.
unconditionally, i.e.  . Then
. Then

 is even, so that
is even, so that
 is odd (resp. even) if and only if
is odd (resp. even) if and only if 
 and a unique even function
and a unique even function  such that
such that  .
. by
by
 ,
,
 , where
, where  is odd and
is odd and  is even. Then
is even. Then  , so that
, so that 






 , define
, define
 (resp.
(resp.  ) if
) if  is even and
is even and  is odd.
is odd. is odd by Problem 3, so that
is odd by Problem 3, so that  is odd by Problem 3, so that
is odd by Problem 3, so that  be continuous. Prove that if
be continuous. Prove that if  , then there exists
, then there exists  such that
such that  whenever
whenever  .
. for some
for some  . Then
. Then  or
or  . In the case
. In the case  such that
such that

 and
and  ,
,
 . Applying the first case, there exists
. Applying the first case, there exists 
 for any
for any  . Prove that
. Prove that
 such that for any
such that for any  . Hence,
. Hence,
 compactly supported if there exists real numbers
compactly supported if there exists real numbers  such that
such that  for
for  and
and  .
. ,
,
 .
.
 ,
,  . By Problem 2,
. By Problem 2,  . However for
. However for  ,
,
![f : [-1, 1] \to \mathbb R](https://s0.wp.com/latex.php?latex=f+%3A+%5B-1%2C+1%5D+%5Cto+%5Cmathbb+R&bg=ffffff&fg=000&s=0&c=20201002) by
by![f(x) = \begin{cases} x^2, & x \in [-1,1] \cap \mathbb Q, \\ -x^2, & x \in [-1,1] \backslash \mathbb Q. \end{cases}](https://s0.wp.com/latex.php?latex=f%28x%29+%3D+%5Cbegin%7Bcases%7D+x%5E2%2C+%26+x+%5Cin+%5B-1%2C1%5D+%5Ccap+%5Cmathbb+Q%2C+%5C%5C+-x%5E2%2C+%26+x+%5Cin+%5B-1%2C1%5D+%5Cbackslash+%5Cmathbb+Q.+%5Cend%7Bcases%7D&bg=ffffff&fg=000&s=0&c=20201002)
 . Since
. Since  as
as  , by the
, by the  as
as  , then there exists
, then there exists  such that for
such that for  ,
,  that will be chosen later. Since
that will be chosen later. Since  , there exists
, there exists 
 . Setting
. Setting  and
and  ,
,
![f : [a, b] \to \mathbb R](https://s0.wp.com/latex.php?latex=f+%3A+%5Ba%2C+b%5D+%5Cto+%5Cmathbb+R&bg=ffffff&fg=000&s=0&c=20201002) be continuous. Suppose that for any
be continuous. Suppose that for any ![x \in [a, b]](https://s0.wp.com/latex.php?latex=x+%5Cin+%5Ba%2C+b%5D&bg=ffffff&fg=000&s=0&c=20201002) ,
,  . Prove that there exists
. Prove that there exists  or
or  . In particular,
. In particular,  .
.![g := | \cdot | \circ f : [a, b] \to \mathbb R](https://s0.wp.com/latex.php?latex=g+%3A%3D+%7C+%5Ccdot+%7C+%5Ccirc+f+%3A+%5Ba%2C+b%5D+%5Cto+%5Cmathbb+R&bg=ffffff&fg=000&s=0&c=20201002) is a composition of continuous functions and thus continuous. By the extreme value theorem, there exists
is a composition of continuous functions and thus continuous. By the extreme value theorem, there exists ![c \in [a, b]](https://s0.wp.com/latex.php?latex=c+%5Cin+%5Ba%2C+b%5D&bg=ffffff&fg=000&s=0&c=20201002) such that for any
such that for any 
 ,
,  , so that defining
, so that defining  yields
yields
 without loss of generality. In the case
without loss of generality. In the case  , apply the first case to the continuous map
, apply the first case to the continuous map  . We claim that
. We claim that  .
. such that
such that  . Assume
. Assume  without loss of generality. By the intermediate value theorem, there exists
without loss of generality. By the intermediate value theorem, there exists  such that
such that  , a contradiction. Therefore,
, a contradiction. Therefore,  , yielding
, yielding  ,
,

 . Therefore,
. Therefore,
![f : [0, 1] \to \mathbb R](https://s0.wp.com/latex.php?latex=f+%3A+%5B0%2C+1%5D+%5Cto+%5Cmathbb+R&bg=ffffff&fg=000&s=0&c=20201002) be continuous and
be continuous and  . Prove that for any
. Prove that for any  , there exists
, there exists ![\xi \in [0,1]](https://s0.wp.com/latex.php?latex=%5Cxi+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=000&s=0&c=20201002) such that
such that  .
. . We aim to show that
. We aim to show that ![x_0 \in [0,1]](https://s0.wp.com/latex.php?latex=x_0+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=000&s=0&c=20201002) such that
such that  . Otherwise,
. Otherwise,  . In particular,
. In particular,
![x_1 \in [0,1]](https://s0.wp.com/latex.php?latex=x_1+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=000&s=0&c=20201002) such that
such that  .
. or
or  . Otherwise,
. Otherwise,  and
and  . Use the
. Use the  such that
such that  , as required.
, as required. for
for  and extended periodically by
and extended periodically by  .
.




 then integrating on the left-hand side yields
then integrating on the left-hand side yields
 , the Fourier series of
, the Fourier series of 
 are defined by
are defined by
![\begin{aligned} a_n &= \frac 2{2} \int_{-2/2}^{2/2} f(t) \cos \left( \frac{2n\pi t}{2} \right)\, \mathrm dt \\ &= \int_{-1}^1 e^t \cos (n \pi t)\, \mathrm dt \\ &= \left[ \frac{e^t ( \cos(n \pi t) + n\pi \sin(n \pi t))}{1 + n^2 \pi^2} \right]_{-1}^1 \\ &= \frac{(-1)^n ( e - e^{-1} )}{1 + n^2 \pi^2} . \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D+a_n+%26%3D+%5Cfrac+2%7B2%7D+%5Cint_%7B-2%2F2%7D%5E%7B2%2F2%7D+f%28t%29+%5Ccos++%5Cleft%28+%5Cfrac%7B2n%5Cpi+t%7D%7B2%7D+%5Cright%29%5C%2C+%5Cmathrm+dt+%5C%5C+%26%3D+%5Cint_%7B-1%7D%5E1+e%5Et+%5Ccos+%28n+%5Cpi+t%29%5C%2C+%5Cmathrm+dt+%5C%5C+%26%3D+%5Cleft%5B+%5Cfrac%7Be%5Et+%28+%5Ccos%28n+%5Cpi+t%29+%2B+n%5Cpi+%5Csin%28n+%5Cpi+t%29%29%7D%7B1+%2B+n%5E2+%5Cpi%5E2%7D+%5Cright%5D_%7B-1%7D%5E1+%5C%5C+%26%3D+%5Cfrac%7B%28-1%29%5En+%28+e+-+e%5E%7B-1%7D+%29%7D%7B1+%2B+n%5E2+%5Cpi%5E2%7D+.+%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)
![\begin{aligned} b_n &= \frac 2{2} \int_{-2/2}^{2/2} f(t) \sin \left( \frac{2n\pi t}{2} \right)\, \mathrm dt \\ &= \int_{-1}^1 e^t \sin (n \pi t)\, \mathrm dt \\ &= \left[ \frac{e^t ( \sin(n \pi t) - n\pi \cos(n \pi t))}{1 + n^2 \pi^2} \right]_{-1}^1 \\ &= -n \pi \cdot \frac {(-1)^n (e - e^{-1} )}{1 + n^2 \pi^2} = -n\pi a_n. \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D+b_n+%26%3D+%5Cfrac+2%7B2%7D+%5Cint_%7B-2%2F2%7D%5E%7B2%2F2%7D+f%28t%29+%5Csin++%5Cleft%28+%5Cfrac%7B2n%5Cpi+t%7D%7B2%7D+%5Cright%29%5C%2C+%5Cmathrm+dt+%5C%5C+%26%3D+%5Cint_%7B-1%7D%5E1+e%5Et+%5Csin+%28n+%5Cpi+t%29%5C%2C+%5Cmathrm+dt+%5C%5C+%26%3D+%5Cleft%5B+%5Cfrac%7Be%5Et+%28+%5Csin%28n+%5Cpi+t%29+-+n%5Cpi+%5Ccos%28n+%5Cpi+t%29%29%7D%7B1+%2B+n%5E2+%5Cpi%5E2%7D+%5Cright%5D_%7B-1%7D%5E1+%5C%5C+%26%3D+-n+%5Cpi+%5Ccdot+%5Cfrac+%7B%28-1%29%5En++%28e+-+e%5E%7B-1%7D+%29%7D%7B1+%2B+n%5E2+%5Cpi%5E2%7D+%3D+-n%5Cpi+a_n.+%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)


![\displaystyle c_n = \frac 12 \left[ \frac{e^{(1 + i \cdot \pi n) t}}{1 + i \cdot \pi n} \right]_{-1}^1 = \frac {(-1)^n (e - e^{-1})(1 - (\pi n) \cdot i)}{2(1 + n^2 \pi^2)},](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+c_n+%3D+%5Cfrac+12+%5Cleft%5B+%5Cfrac%7Be%5E%7B%281+%2B+i+%5Ccdot+%5Cpi+n%29+t%7D%7D%7B1+%2B+i+%5Ccdot+%5Cpi+n%7D+%5Cright%5D_%7B-1%7D%5E1+%3D+%5Cfrac+%7B%28-1%29%5En+%28e+-+e%5E%7B-1%7D%29%281+-+%28%5Cpi+n%29+%5Ccdot+i%29%7D%7B2%281+%2B+n%5E2+%5Cpi%5E2%29%7D%2C&bg=ffffff&fg=000&s=0&c=20201002)

 is constant.
is constant. denote the acceleration of an object in linear motion at time
denote the acceleration of an object in linear motion at time  . Newton contemplated that the velocity
. Newton contemplated that the velocity  of the object can be obtained by summing up approximate accelerations in small units
of the object can be obtained by summing up approximate accelerations in small units  of time:
of time:

 can be defined by
can be defined by

 as per the discussions above. Suppose
as per the discussions above. Suppose  and
and  . Suppose
. Suppose  is constant. Then the following laws of kinematics hold:
is constant. Then the following laws of kinematics hold:
![\begin{aligned} v(t) &= \int_0^t a(u)\, \mathrm du \\ &= \int_0^t a\, \mathrm du \\ &= v(0) + \left[au\right]_0^t \\ &= v_0 + at. \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D+v%28t%29+%26%3D+%5Cint_0%5Et+a%28u%29%5C%2C+%5Cmathrm+du+%5C%5C+%26%3D+%5Cint_0%5Et+a%5C%2C+%5Cmathrm+du+%5C%5C+%26%3D+v%280%29+%2B+%5Cleft%5Bau%5Cright%5D_0%5Et+%5C%5C+%26%3D+v_0+%2B+at.+%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)
![\begin{aligned} s(t) &= \int_0^t v(u)\, \mathrm du \\ &= \int_0^t (v_0 + au)\, \mathrm du \\ &= s(0) + \left[v_0 u + \textstyle \frac 12 au^2\right]_0^t \\ &= s_0 + v_0 t + \textstyle \frac 12 at^2. \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D+s%28t%29+%26%3D+%5Cint_0%5Et+v%28u%29%5C%2C+%5Cmathrm+du+%5C%5C+%26%3D+%5Cint_0%5Et+%28v_0+%2B+au%29%5C%2C+%5Cmathrm+du+%5C%5C+%26%3D+s%280%29+%2B+%5Cleft%5Bv_0+u+%2B+%5Ctextstyle++%5Cfrac+12+au%5E2%5Cright%5D_0%5Et+%5C%5C+%26%3D+s_0+%2B+v_0+t+%2B+%5Ctextstyle++%5Cfrac+12+at%5E2.+%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)

 , initial velocity
, initial velocity  , and initial angle
, and initial angle  and vertical displacement
and vertical displacement  are given by
are given by
 denotes gravitational acceleration on earth. Furthermore, the path of the cannonball follows the shape of a parabola (i.e. the graph of a quadratic function).
denotes gravitational acceleration on earth. Furthermore, the path of the cannonball follows the shape of a parabola (i.e. the graph of a quadratic function). and the horizontal acceleration is
and the horizontal acceleration is 
 and the vertical acceleration is
and the vertical acceleration is  , so that by Theorem 1,
, so that by Theorem 1,

 -directions, we’ll need a tinge of
-directions, we’ll need a tinge of  .
. ). Let
). Let  be a constant that quantifies the air resistance that opposes the object’s motion. Newton’s second law yields the equation
be a constant that quantifies the air resistance that opposes the object’s motion. Newton’s second law yields the equation
 as
as  . This is known as the terminal velocity of the object.
. This is known as the terminal velocity of the object.
 ,
,

 ,
,

 , so that
, so that
 . Hence,
. Hence, 