Many linear algebra texts open with a definition of the dot product, say in three dimensions, as follows:

But where on earth did this formula arise from? Other authors open with a geometric definition with the dot product, but I shall open with a simple question: Given two vectors 



Motivated by the Pythagorean theorem, we can define the length of a two-dimensional vector as follows.
Definition 1. Given 

Intuitively, this quantity captures the length of
Consider two vectors 
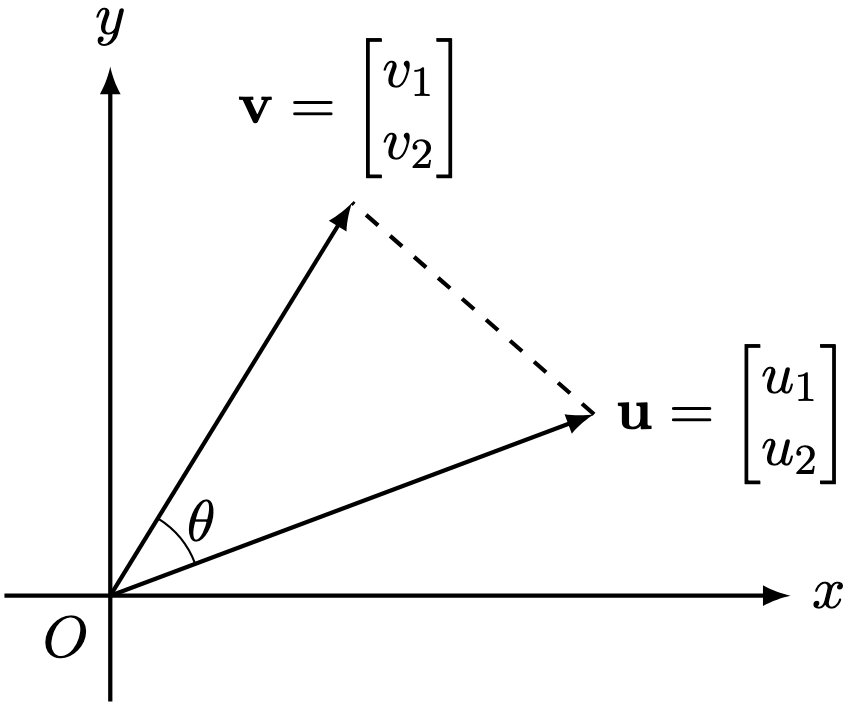
Consider the triangle 




so that

Using the law of cosines (or re-deriving its algebraic equivalent),

Equating the two displays for 

Therefore, the angle between 


so that we obtain the dot product equation

Yet, the dot product is itself of considerable interest. We can generalise it and talk about angles between other kinds of objects using this idea. This generalisation also features heavily in STEM applications in the form of linear regression. We can even use the dot product to give a theoretically meaningful interpretation to the transpose of a matrix. More on these ideas in future posts.
Theorem 1. For any two vectors

The dot product satisfies the following properties:
- For any
,
.
- For any
implies
.
- For any
.
- For any
by
, the functions
and
are linear over
.
Furthermore, for nonzero 

Proof. The second property is slightly tricky. Fix

Hence, 

The dot product motivates the defining properties of the inner product, which we formulate to generalise the dot product.
Let 

Definition 1. A map 

- For any
,
.
- For any
implies
- For any
,
. When
, we recover usual symmetry.
- For any
is linear.
The pair 
Corollary 1. The dot product of two-dimensional vectors (i.e. in 
Henceforth, suppose 
Lemma 1. For any

The following properties hold:
- For any
.
- For any
implies
- For any
,
.
Proof. For the third property, we have

Lemma 2 (Cauchy-Schwarz Inequality). For any

Proof. Fix 


In either instance, we have 

Define the function 

By expanding the definition of 

Since 


yielding 
Theorem 2. For any 
- For any
.
- For any
implies
- For any
.
- For any
.
We call 
Proof. For the last result, we use the Cauchy-Schwarz inequality to derive that

where we defined 



Corollary 2. For any nonzero 

Then 
![\theta \in [0, \pi]](https://s0.wp.com/latex.php?latex=%5Ctheta+%5Cin+%5B0%2C+%5Cpi%5D&bg=ffffff&fg=000&s=0&c=20201002)

Then 
Proof. For the final result, we note that 

Corollary 3. Define the metric 

The following properties hold:
- For any
,
.
- For any
implies
- For any
.
- For any
,
.
We call 
Proof. For the last result, use the observation

Therefore, all inner product spaces are normed spaces, and all normed spaces are metric spaces. By some further investigation, every metric space forms a topological space too. If we took a different generalisation from the usual narrative, we would have explored the notion that all normed spaces are topological vector spaces, which in turn are topological spaces.
Each generalisation has their uses in modern mathematics, but for now, let’s focus on inner product spaces. We will first explore the theory of inner product spaces before exploring their ubiquitous applications across mathematics. In particular, let’s broaden the notion of perpendicularity into orthogonality.
—Joel Kindiak, 12 Mar 25, 1407H

Leave a comment